


Huang Qingjiu
黄 慶九准教授
- 所属
-
工学部 電気電子工学科
大学院 工学研究科 電気・電子工学専攻
- 研究室
- 制御システム研究室
- キャンパス
- 新宿
- 研究キーワード
- 電気モータの位置決め制御 / 多関節ロボットの運動制御 / 制御理論の研究
- 主な研究テーマ
- ACサーボモータのインバータ回路と位置・速度・電流・トルクの制御
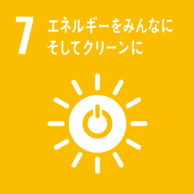
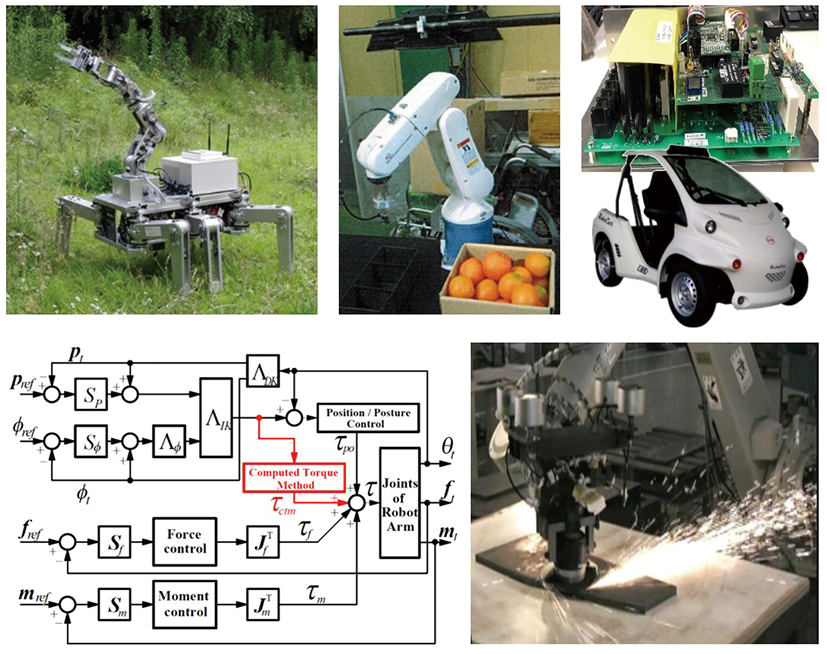
6足歩行ロボットとロボットアームの機構、運動学、動力学、運動制御
自動車の走行制御・電気自動車のインバータ制御 など
- 関連する「持続可能な開発目標(SDGs)」
-


[学部]高性能高効率の制御で生産効率向上、環境保全に貢献する
ロボットと自動車を研究対象として、電気と機械の動特性に応じる自然エネルギー及びバーチャル力学を提唱し、位置制御だけではなく、環境適応性を持つ力制御、インピーダンス制御、画像認識、ビジュアルサーボ制御を重視し、いままでの適応制御、ロバスト制御、最適制御、またファジー制御、 ニューラルネットワーク制御などの知的制御の理論を充実するような研究を行います。それらの研究を通じて、産業分野の生産効率の向上、環境保全、 高齢化社会向けの安全や安心を支える技術の創出をめざしています。
[大学院]高性能・高効率のロボットの知的運動制御
ロボットの環境適応性、省エネルギー、高精度の運動性能を実現するため、電気と機械の動特性に応じる自然エネルギーおよびバーチャル力学に基づき、2足・多足ロボットおよび自動車の歩行・走行の制御、産業ロボットの力制御、またそれらの基礎である電気モータなどのアクチュエータのアクセス制御、さらに木材伐採用パワーアシストおよびミカン収穫ロボットの開発を研究しています。本研究室は、制御技術に興味がある人、またプログラムの書き込み、電気・電子回路の設計、ロボットの開発などのノウハウを身につけたい人に向きます。