Suzuki Kenji
鈴木 健司教授
- 所属
-
工学部 機械システム工学科
大学院 工学研究科 機械工学専攻
- 研究室
- マイクロシステム研究室
- キャンパス
- 八王子
- 研究キーワード
- マイクロロボット / バイオミメティクス(生物模倣) / 機能性表面 / マイクロ加工
- 主な研究テーマ
- 生物規範型マイクロロボットの研究
微細構造を有する機能性表面の開発 など
- 関連リンク
- 関連する「持続可能な開発目標(SDGs)」
-



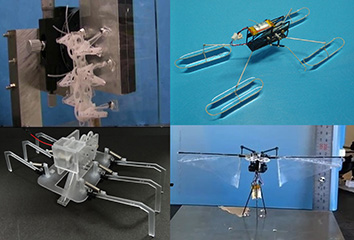
生物に学ぶマイクロシステム
本研究室では、クリーンルームなどの最先端設備を利用して、情報、医療、バイオ等の分野で飛躍的な発展が期待されるマイクロロボットやマイクロマシンの研究を行っています。マイクロロボットの製作では、昆虫などの微小生物の優れた能力を参考にして、小さいからこそ可能となる壁面歩行、水面移動、はばたき飛翔などの機能を工学的に解明し、ロボットで再現しています。また、表面に微細な構造を加工することによって摩擦や付着、濡れ性、流体抵抗などの制御を行う機能性表面の開発も行っています。